
Voyis Imaging Inc. (Voyis) today announces the launch of the Discovery Stereo Perception Series, a new class of subsea stereo vision systems engineered to enhance piloting awareness and enable autonomous underwater operations through real-time 3D perception.
Three years ago, Voyis introduced the Discovery Inspection Series, establishing a new benchmark for subsea stereo imaging and 3D inspection. Since then, Discovery systems have supported hundreds of survey projects worldwide across a broad range of ROV platforms and subsea environments. Through these deployments, Voyis has strengthened its position as a leader in subsea stereo camera technology while gaining critical insight into the operational challenges facing vehicle manufacturers, offshore operators, and robotic developers.
As subsea operations continues to evolve, the demand for autonomy has intensified. However, a critical technology gap has remained. Forward looking sonar systems, while essential for long-range detection & avoidance, do not provide the spatial resolution required for fine manipulation or close-range navigation. Conversely, traditional monocular-camera systems lack the 3D depth perception necessary for reliable autonomous behaviors. True subsea autonomy requires dense, real-time spatial understanding — a capability not previously available in a compact, vehicle-integrated optical system.
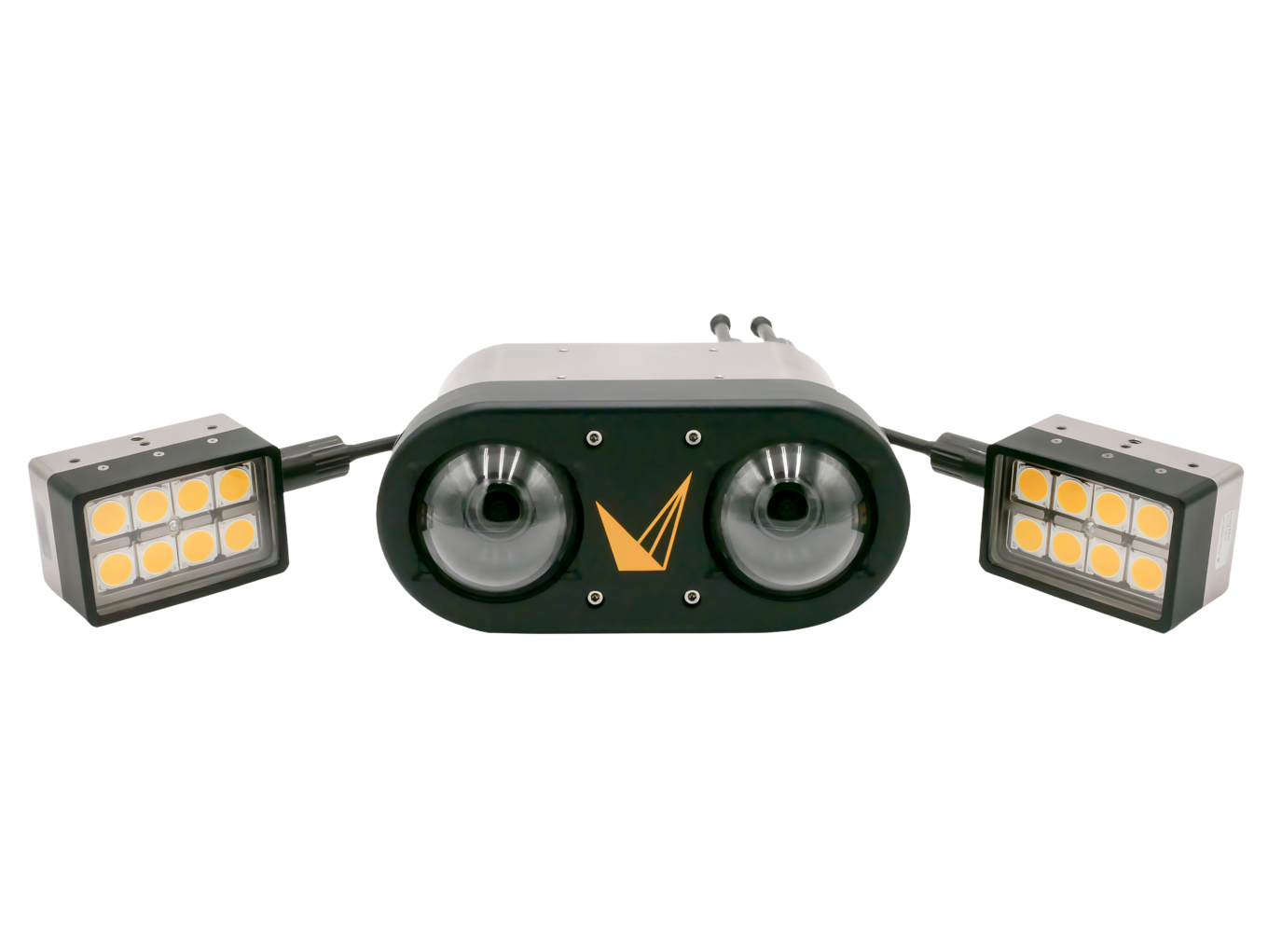
The Discovery Perception Series has been developed to address this gap. Designed to function as the eyes of subsea vehicles, the system replaces traditional single-camera configurations with real-time stereo vision and 3D depth perception. Wide-angle stereo imaging combined with onboard processing generates dense depth maps and live point clouds, delivering reliable spatial awareness in complex underwater environments.
Seamlessly integrated with subsea platforms, the Perception Series provides low-latency video for piloting, high-quality still imagery, and true-scale depth data simultaneously. This enables operators to improve vehicle positioning, monitor proximity to assets, and maintain situational awareness with enhanced confidence. By delivering depth perception directly on the vehicle, the system supports advanced capabilities such as station keeping, manipulator assistance, and the development of autonomous control frameworks.
Beyond piloting and autonomy, the Discovery Perception Series also supports photogrammetric workflows for general 3D estimation. Captured stereo imagery can be processed to generate indicative 3D models that allow operators to assess object size, geometry, and relative change over time. This capability supports visual screening and prioritization in applications where certified inspection accuracy is not required, expanding operational insight without introducing additional system complexity.
The Discovery Perception Series is available in two models — the P300 and the P3000 — designed to accommodate varying depth ratings and platform requirements. Both models deliver wide field-of-view stereo imaging and onboard depth computation optimized for real-time performance. By combining enhanced piloting awareness with actionable 3D perception, the system redefines the role of a subsea piloting camera.
“The Discovery Perception Series represents the next stage in subsea vehicle vision,” said Chris Gilson, CEO of Voyis. “After supporting hundreds of high-accuracy inspection and survey projects worldwide, we recognized that autonomy cannot rely on sonar or single-camera systems alone. By delivering real-time stereo perception directly on subsea platforms, we are enabling vehicles not only to see the environment, but to understand it spatially. This is a foundational step toward reliable subsea autonomy.”
With the launch of the Discovery Stereo Perception Series, Voyis continues its commitment to advancing underwater optical sensing — expanding vehicle capability, improving operational awareness, and helping shape the next generation of subsea robotics.




