The Voyis Perception ROV Skid was built to improve the efficiency of one-person deployable inspection class ROVs (Remotely Operated Vehicles), by bringing together optical sensors, navigational systems, and control software. The all-in-one Perception Skid is a complete solution for ROV inspections.
And to prove that, during the month of September 2022 our team had the amazing opportunity of demonstrating the capabilities of the Perception ROV Skid for remote underwater mine identification, at the US Navy ANTX Coastal Trident Demonstration. In today’s post we will go over the details of the event, and the results Voyis was able to display.
ANTX Coastal Trident
Coastal Trident is a research program conducted annually to advance the state of the art in countering threats to port and maritime security and sustaining the global operations of naval forces. It is planned and conducted by the Naval Surface Warfare Center’s Port Hueneme Division, in partnership with Matter Labs, Economic Development Collaborative-Ventura County, and the Port of Hueneme, and serves stakeholders in military, homeland security, and emergency response capabilities in the port and maritime domains.
Project Partners
The key elements displayed during the demonstration include:
- VideoRay’s Mission Specialist Defender ROV: with seven thrusters, the one-person portable Defender can move through the water in any direction and maintain active pitch to face the vehicle in an upward or downward orientation.
- Voyis’ Perception ROV Skid: a compact payload designed for ease of integration with inspection class ROVs and equipped with accurate vehicle positioning (SPRINT-Nav Mini) and highly detailed imaging and modelling sensors (Insight Micro). Rigidly co-locating these two sensors removes any need for patch testing in the field and completing the Skid as a standalone swappable payload.
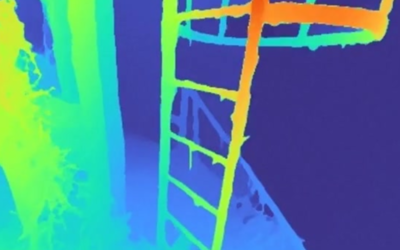
- Voyis’ Insight Micro Laser Scanner & 4K Stills Imaging: with a laser line capture rate up to 100 Hz, the Insight Micro can create real-time millimetric 3D models that are georeferenced when coupled with a capable navigation solution. In addition to capturing high-resolution laser point cloud data, the Insight Micro captures crisp, 4K stills images without interfering with the laser scanner. Datasets captured are optimized in real-time onboard the sensor.
- Sonardyne’s SPRINT-Nav Mini Navigator: the world’s smallest hybrid navigator. It combines a Doppler Velocity Log (DVL), Inertial Measurement Unit (IMU) and depth sensors into a single, pre-calibrated package. It provides a continuous stream of positions, orientation, velocities, depth, and altitude at up to 200 updates per second.
- Sonardyne’s Initiation Transponder 6 (IT6) – Acoustic Firing Device: designed to be connected directly to a remotely deployed, non-electric mine neutralization device, it allows commercial and naval EOD teams to send a secure-by-design wireless, acoustic command from their vessel to initiate a shock tube.
- EIVA’s NaviSuite Mobula Pro + Processing Software: for vehicle autonomy and data visualization, this complete topside software offers unique capabilities to automate the control of the Perception skid. The end-result is extensive deliverables with high-quality inspection data.

Demonstrated Results
During the ANTX Coastal Trident Demonstration, together with our partners, we were able to successfully demonstrate the following core capabilities:
Vehicle Autonomy:
- Perform autonomous ROV navigation using Go-to-Waypoint commands.
- Perform autonomous search operations commanding the ROV to perform designated grid search pattern.
- Perform autonomous orbiting around the target to capture 360-degree datasets of the MLO (mine like objects) to support identification.
- Perform ROV station keeping at various points throughout the operation.
Identification:
- Demonstrate the ability to easily identify the target using high quality stills images and 3D models with the most advanced data processing capabilities in real-time.
- Enable the Pilot to identify the threat onboard the vessel.
- Demonstrate the simplicity of capturing laser and stills data using the Perception ROV Skid.
- Provide datasets with target confirmed locations within the metadata.
Neutralization:
- Simulate acoustic triggering using the IT6.
- Demonstrate the simplicity of deploying the IT6 using the ROV.
The demonstration at Imperial Beach allowed the project team to successfully demonstrate vehicle autonomy through trajectory mapping, orbiting, and waypoint following, along with providing detailed optical datasets of the threat once found to support confident identification capabilities.


Vehicle autonomy helps to navigate the ROV in complex environments. Allowing the ROV to perform internal decision-making tasks based on higher quality datasets will enable USVs to perform MCM (mine countermeasure) operations with reduced human intervention. In addition, enabling smaller platforms to provide greater detail and accuracy than ever before, will allow defence organizations to make confident decisions in the field without the need to mobilize complex platforms.
By improving the optical capabilities of your autonomous systems, Navies will gain operational efficiency given the minimal assets required to perform a complete mission, and there is overall reduced risk as divers or humans only need to enter the field once a threat is confirmed and the infield state is accurately documented, or they do not need to enter at all.
In addition to proving ROV autonomy for MCM operations, during ANTX we were also able to demonstrate how easy and fast it is to set up the skid to the vehicle. The Perception ROV Skid is developed with the “Quick Connect” mounting methodology to negate the need for tools and to simplify the integration when in the field, offering a true plug-and-play solution.
Download our datasheet to learn more: