Underwater Visual Simultaneous Localization and Mapping (VSLAM) represents a leap forward in subsea inspection technology. VSLAM uses visual image data to simultaneously map an underwater environment and track the relative position of a subsea vehicle. When performed in real time, this revolutionary technology enables accurate survey quality control for immediate decision-making and inspection optimization. The recent launch of the Voyis VSLAM Powered by EIVA NaviSuite marks a significant advancement in this field, building on years of collaboration between EIVA and Voyis.
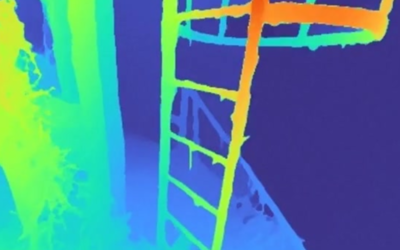
Through edge processing on the Discovery Stereo camera and integration with EIVA’s NaviSuite VSLAM algorithms, this VSLAM solution generates a 3D model of the inspection environment in real-time, executing accurate coverage mapping for complete data capture and tracking throughout the survey process. This real-time digitization provides operators with a visual representation of their target, enhancing coverage and tracking effectiveness and augmenting piloting with 3D spatial awareness.
The Importance of Exceptional Hardware for Underwater VSLAM
Hardware technology is crucial for the success of underwater VSLAM. The reliability and quality of the hardware directly impacts the accuracy and efficiency of the data collected. In underwater environments, where conditions can be harsh and unpredictable, robust and precise hardware becomes even more essential. High-quality imaging systems, like those developed by Voyis, provide the foundation for accurate 3D optical surveys, and deliver data quality to the highest standard to resolve finer details and defects to improve the confidence of the results captured.
When choosing a camera for underwater VSLAM, key differentiators to look for include high dynamic range imaging, precise calibration, and robust construction to withstand underwater conditions. Furthermore, coupling the premium hardware with onboard image enhancements to optimize the data acquisition and delivery process is essential in offering a complete solution for subsea 3D optical surveys. Voyis’ Discovery Stereo camera excels in these areas, setting a new standard for underwater imaging systems.
Discovery Stereo Camera: The Pinnacle of Engineering Expertise
The Discovery Stereo camera by Voyis stands out as the best hardware solution for underwater VSLAM, demonstrating superior engineering expertise through its advanced features. One key innovation is its edge computing capability, which allows the camera to execute machine vision algorithms onboard. This contrasts with most subsea cameras that rely on external processing and therefore cannot achieve real-time point cloud displays like Voyis VSLAM Powered by EIVA NaviSuite can.
Another defining feature of the Discovery Stereo camera is its high dynamic range (HDR) sensor. While typical cameras capture 8-bits of light resolution per pixel, the HDR sensor captures over 12-bits, significantly enhancing the camera’s ability to resolve both bright and dark areas simultaneously. This is crucial for imaging complex structures underwater, as it enables effective feature detection by resolving fine brightness variations that 8-bit sensors typically miss. The superior dynamic range ensures that even bright areas are captured with high detail. And when working in high turbidity water, the HDR effectively dehazes the image, as bright particles in the water column and dark features of the target behind the particles are balanced evenly to bring out more details of the target.
The Discovery Stereo camera also boasts a large field of view, 75°x75°, which is instrumental in capturing expansive underwater scenes. Additionally, it comes pre-calibrated, eliminating the need for users to perform this complex and often cumbersome task. This precise calibration ensures that users can immediately start utilizing the camera with confidence in its accuracy. To further speed up mobilization, NaviSuite VSLAM software automatically discovers the Discovery Stereo camera in the network and connects to it through data distribution service (DDS) technology.
Accurate Mapping and Imaging
Utilizing a global shutter sensor, the Discovery Stereo captures light at a single instance across all pixels, avoiding the distortions common with rolling shutter sensors, and maintaining the correct relative positions of features in the image.
Crisp, high-resolution imagery is another hallmark of the Discovery Stereo camera. It provides real-time color correction and light leveling, ensuring that the images are clear and true to life. This high-quality imagery is critical for detailed underwater inspection and mapping, where every detail can be significant.
Lighting is also optimized in the Discovery Stereo camera, with each unit equipped with ultra-bright Nova Mini LEDs. These lights can operate in synchronized strobe mode for maximum light output or be held continuously on, ensuring sufficient illumination for machine vision. This feature streamlines system control and guarantees that the camera can capture well-lit images in various underwater conditions.
High Resolution Images for Precise Underwater 3D Digitization
Finally, the Discovery Stereo camera’s superior optics set it apart from other subsea cameras. It features high-quality glass elements that collect more light and resolve finer features, ensuring that the camera’s high-resolution sensor is fully utilized. Additionally, the camera employs dome viewports instead of flat ones, which prevents the nonlinear distortion typical of flat viewports. This design choice enhances image accuracy and expands the field of view, making the Discovery Stereo camera an indispensable tool for precise underwater VSLAM.