The Voyis Perception ROV Skid was built to improve efficiency of inspection class ROVs (Remotely Operated Vehicles), by creating an all-in-one solution for these portable subsea vehicles, as it enables autonomy for subsea inspections.
By bringing together optical sensors, navigational systems, and software, the Perception Skid is a complete solution for ROV inspections.
In today’s post, we will explain how this compact solution is enabling ROV autonomy, creating a more efficient and safe solution for offshore surveys.
Greater data, greater certainty
Voyis optical systems are enabling autonomy by providing the highest resolution datasets possible in real-time to allow robotic systems to make decisions more easily and effectively. This includes generating real-time laser point cloud data and stills images, instantly enhanced with data cleaning algorithms and image corrections such as undistortion, light leveling, and machine learning based true-colour correction.
By performing these enhancements onboard the sensor, robotic systems can perform anomaly detection and eventing on the fly, can improve vehicle navigation with laser-based loop closure, as well as automate the overall data workflow by providing deliverables instantly.
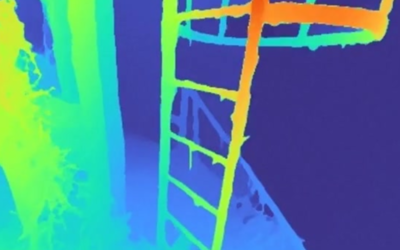
To highlight how greater detail can enable autonomy, we have this example above of a pipeline, where you can see the comparison between Voyis laser data and traditional sonar data. The sonar data provides a great generalization of the pipeline, but the missing data points in the model leave the dataset up to interpretation, and operators cannot be sure if the datapoints were missing due to the ROV flight pattern, or if there actually is an area that should be investigated further.
With the Voyis laser data on the right, the state of the pipeline is clear, and it is easy to identify where it needs repair. Laser data provides both qualitative and quantitative results to offer complete certainty in the condition of underwater assets. This level of detail is critical in discussing autonomy and enabling robotic systems to make decisions unsupervised.
In addition to high resolution data, the Perception ROV Skid comes with an integrated with Sonardyne’s High grade INS/DVL navigation system. Accurate positioning is essential for autonomous operations, by correctly tagging the laser and camera data, systems can achieve confident interpretation.
ROV Control and Visualization Software
Reliable software for ROV control and data processing is vital for a vehicle’s autonomy. EIVA NaviSuite Mobula Pro is a complete topside software for your ROV offering unique capabilities for adding various sonars and laser-scanners, data processing and automation.
NaviSuite Mobula Pro is a high-speed 3D software, that provides data fusion/georeferencing for all sensor data, with multiple 3D views with map and satellite image backgrounds. The software ensures proper datasets are collected, offering quality control on data as you can visualize what has been captured, with appropriate overlaps for confident data coverage.
The key features of NaviSuite Mobula for the Perception ROV Skid are:
- Go to waypoint: define location for the vehicle to travel
- Orbit target: orbit a target at a set radius, altitude from seabed
- Grid/trajectory following: plan a search area by defining a grid for the vehicle to traverse (lawnmower pattern)
- Station keeping: hold position at a set location and altitude
Coupling EIVA’s software with the high-quality sensors within the Perception Skid enables accurate autonomous ROV operations with advanced data collection capabilities.
Download our datasheet to learn more: