Ocean surveyors have historically relied on subsea video cameras deployed in underwater vehicles for environmental monitoring, general inspection, and underwater situational awareness. But the operating mechanism of “video” significantly limits the ability of advanced image processing and machine vision. Conversely, stills imaging provides revolutionary advantages when used correctly.
Voyis endeavours to produce underwater imagery where the effects of the water medium are entirely removed. Which will enable the use of standard terrestrial processing algorithms like photogrammetry and machine learning. In fact, this is a core focus of our mission to See the Depths like We See the Surface.
This blog is part of our Colour Imaging series. This edition will focus on how our cameras simplify the adoption of standard photogrammetry software into survey workflows.
What is photogrammetry?
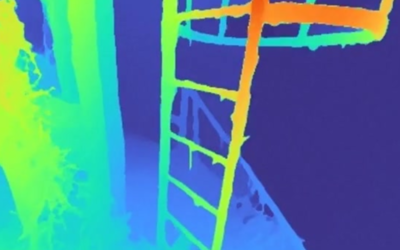
Photogrammetry is the art and science of extracting 3D information from photographs. The process involves taking overlapping photographs of an object, structure, or space, and converting them into 2D or 3D digital models.
Using photogrammetry under water is not as common as terrestrial applications with aerial drones, but the demand for accurate underwater maps and models is driving adoption for ocean environmental monitoring, marine archaeology, salvage, and subsea infrastructure inspection.
With a measurable 3D model or 2D map of a large area, shipwrecks can be documented for scene reconstruction; bridge piers can be visualized for maintenance and repair; offshore assets can be mapped; regions can be repetitively monitored for detecting environmental change; and more.
How Voyis is making it possible
Wide area image mapping has incredible potential to truly bring the ocean to life, providing surveyors, researchers, and navies an enhanced understanding of this unknown environment. With this goal in mind, Voyis has endeavored to solve the historical challenges that have limited widespread adoption, to deliver an extraordinary true colour imaging capability that enables the application of cutting-edge terrestrial photogrammetry software by simply dropping in the pre-processed Voyis images.
- Colour correction: With photogrammetry the features that must be matched in the image sequence will be observed form different perspectives. At each perspective, both the perceived colour of the feature will have changed, and the lighting distribution will be altered as the artificial light source moves relative to the feature. A solution must therefore balance both colour reproduction effectiveness, and image-to-image consistency in its performance.
To address this complex problem, Voyis has developed an imaging solution suitable for a range of applications that leverages machine learning to efficiently train a colour Correction Model for the current survey location. Click here to learn more about how our colour correction technology works.
When images have been consistently corrected to remove all aspects of the water medium – colour, lighting, and distortions – the output dataset can be directly utilized in terrestrial photogrammetry software like Pix4D to produce incredible wide-area image maps (orthomosaics) and 3D models.
- Even illumination: The second challenge for photogrammetry is producing an even illumination across the entire camera field of view. This is critical both for the visual appearance of the image and resulting 3D model, but also to ensure that features can be detected both in the center of the image and the corners. Photogrammetry must be able to detect features across the entire imaging area to be effective.
Voyis imaging systems employ a two-pronged approach to combat the phenomenon of uneven lighting, utilizing both physical and algorithmic lighting correction: the design of our NOVA LED panels, and dynamic range. Click here to learn more about how our even illumination and dynamic range technologies work.
- Camera Focus: Many underwater camera systems utilize Auto Focus to continuously optimize image focus as the scene varies throughout a survey. There are two core challenges with this approach that are detrimental to photogrammetry: focus consistency and camera calibration.
When auto focus is employed to survey complex structures, the focus algorithm will often lock onto different features in sequential image captures and noticeably adjust the overall camera focus. This focus inconsistency hinders the ability of SFM to match feature between frames. The second challenge arises in that when a lens’ focus distance changes, its parameters change, altering the camera model from its calibrated state. This result is an inaccurate undistortion model that reduces the accuracy of photogrammetric 3D models.
Voyis has concluded that the use of Fixed Focus lenses offers the best solution to deliver robust image capture, since they maintain a constant camera calibration and are more robust to mechanical vibrations. By finely tuning the fixed focus distance during calibration it is possible to provide both a consistent focus across the field of view, and an effective focus depth of field across typical imaging ranges.
Deep Vision Optics
In an effort to keep perfecting the images from our systems, we have proudly launched the Deep Vision Optics. This cutting-edge solution is being released for the Voyis’ Discovery Vision Systems and the Observer Imaging Systems, setting a new standard in underwater imaging performance.
Deep Vision Optics delivers industry-leading image quality, maximizing field-of-view utilization to enhance situational awareness for ROVs and improve visual surveys with AUVs. Optimized image sharpness boosts feature and target detection, supporting machine learning applications with reliable automated analysis. Enhanced corner sharpness improves stability in photogrammetry and VSLAM processes, while higher depth of field ensures accurate photogrammetry, reducing manual intervention and accelerating data processing for faster, more reliable survey results.